Simulator Engine
Currently there are four engines used in sbp-env that are used to simulate collisions and the planning environment.
Black Box Engine
This is a custom blackbox engine where you only need to specify a function that returns True or False depending on where a given configuration is feasible or not.
This is the most flexible engine, and uses the sbp_env.collisionChecker.BlackBoxCollisionChecker for environment simulation and with the sbp_env.visualiser.BlackBoxEnvVisualiser to visualise the planning scene (only works with 2D).
import sbp_env
from math import sin, cos
engine = sbp_env.engine.BlackBoxEngine(
collision_checking_functor=lambda x: -0.22 < (cos(x[0]) * sin(x[1])),
lower_limits=[-5, -5], upper_limits=[5, 5],
cc_epsilon=0.1, # collision check resolution
)
planning_args = sbp_env.generate_args(
planner_id="rrt", engine=engine,
start_pt=[-3, -3], goal_pt=[3, 3],
display=True, first_solution=True,
)
env = sbp_env.env.Env(args=planning_args)
env.run()
print(env.get_solution_path(as_array=True))
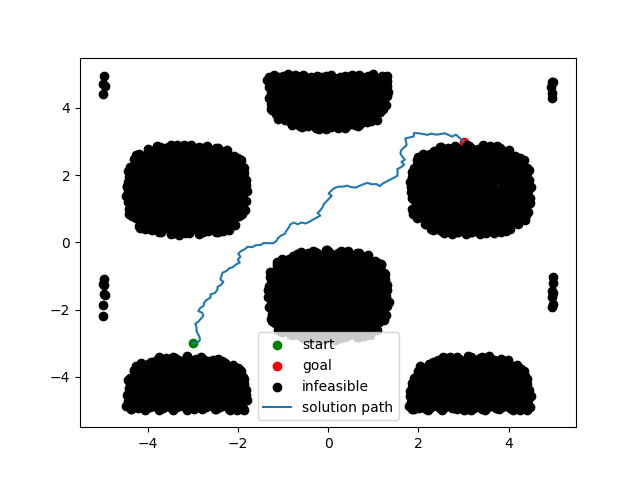
This simulator uses an arbitrary functor as its C-Space by sampling from the given function. If the functor returns Trues they are in \(C_\text{free}\), otherwise, the configuration are regarded as being in \(C_\text{obs}\). The \(d\) dimensional space of the C-Space
is defined by the lower and upper bounds given to the function argument and the blackbox functor.
- class sbp_env.engine.BlackBoxEngine(collision_checking_functor, lower_limits, upper_limits, dist_functor=<function euclidean_dist>, cc_epsilon=0.1)[source]
Bases:
EngineArbitrary black box engine
- Parameters
collision_checking_functor (
Callable[[ndarray],bool]) – functor that return True if the given configuration is feasiblelower_limits (
ndarray) – an array of the lower bounds of the C-Spaceupper_limits (
ndarray) – an array of the lower bounds of the C-Spacedist_functor (
Optional[Callable[[ndarray,ndarray],float]], optional) – an optional functor that computes the distance between two configurationsDefault:<function euclidean_dist>cc_epsilon (
float, optional) – the norm in-between each collision checkDefault:0.1- get_dimension()[source]
Get the current dimensionality of this space
- Return type
- Returns
the dimensionality
- class sbp_env.collisionChecker.BlackBoxCollisionChecker(collision_checking_functor, cc_epsilon)[source]
Bases:
CollisionCheckerAbstract collision checker
- feasible(p)[source]
Check if the configuration is in free-space, i.e., \(q \in C_\text{free}\)
- Parameters
p (
ndarray) – configuration to check
- visible(pos1, pos2)[source]
Check if the straight line connection between pos1 and pos2 is in \(C_\text{free}\). Internally it might calls
feasible().
2D Image Space
The is a 2D image space engine with the configuration space (C-Space) as \(C \subseteq \mathbb{R}^2\). This engine is very easy to use and very easy to add new environments. This uses the
sbp_env.collisionChecker.ImgCollisionCheckerfor environment simulation and with thesbp_env.visualiser.PygameEnvVisualiserto visualise the planning scene.python main.py rrdt maps/room1.png
This simulator uses images as its C-Space by treating each white pixels as configurations in \(C_\text{free}\), and each non-white pixels as configurations in \(C_\text{obs}\). The two dimensional space of the C-Space
\[q \equiv [x_0, x_1] \in C \subseteq \mathbb{R}^2 \]would be taken as the width and the height of the image
\[0 \le x_0 < \mathcal{I}_\text{Width} \\ 0 \le x_1 < \mathcal{I}_\text{Height} \]where \(\mathcal{I}\) denotes the image space.
Important
Internally, all pixels with an RGB value of (255, 255, 255) would be treated as \(q \in C_\text{free}\), and any non-white pixels value will be treated as \(q \in C_\text{obs}\) (e.g. (10, 20, 10), (0, 0, 0), etc.). The alpha channel would not be considered.
- class sbp_env.engine.ImageEngine(args, image)[source]
Bases:
Engine- Parameters
args (PlanningOptions) –
image (str) –
- class sbp_env.collisionChecker.ImgCollisionChecker(img)[source]
Bases:
CollisionChecker2D Image Space simulator engine.py
- Parameters
img (
str) – a file-like object (e.g. a filename) for the image as the environment that the planning operates instats – the Stats object to keep track of stats
- feasible(p, save_stats=True)[source]
Check if the configuration is in free-space, i.e., \(q \in C_\text{free}\)
- Parameters
p – configuration to check
- get_coor_before_collision(pos1, pos2)[source]
Get the list of coordinate before the collision
- Parameters
pos1 – first configuration
pos2 – second configuration
- static get_line(start, end)[source]
Bresenham’s Line Algorithm Produces a list of tuples from start and end
- Parameters
start – the starting pixel coordinate
end – the ending pixel coordinate
>>> points1 = get_line((0, 0), (3, 4)) >>> points2 = get_line((3, 4), (0, 0)) >>> assert(set(points1) == set(points2)) >>> print points1 [(0, 0), (1, 1), (1, 2), (2, 3), (3, 4)] >>> print points2 [(3, 4), (2, 3), (1, 2), (1, 1), (0, 0)] http://www.roguebasin.com/index.php?title=Bresenham%27s_Line_Algorithm
- property image: ndarray
The image that represents the planning problem
- Return type
- Returns
the input image
- visible(pos1, pos2)[source]
Check if the straight line connection between pos1 and pos2 is in \(C_\text{free}\). Internally it might calls
feasible().- Parameters
pos1 – the starting configuration of the line
pos2 – the target configuration of th eline
4D Robot Arm
This simulator internally depends on
sbp_env.collisionChecker.ImgCollisionCheckerto check for collision in the image space.python main.py rrt maps/4d.png -s .5 --engine 4d
In contrast to the former, this simulator not only check for point mass collisions, but performs forward kinematic on the given joints configuration to obtain body points in world-space \(\mathcal{W}\subseteq \mathbb{R}^2\). Since the robot arm contains two configurable joints, the full configuration space \(C\) is given by
\[q \equiv [x_0, x_1, r_0, r_1] \in C \subseteq \mathbb{R}^4 \]where
\[\begin{aligned} 0 & \le x_0 < \mathcal{I}_\text{Width} \\ 0 & \le x_1 < \mathcal{I}_\text{Height} \\ - \pi & \le r_0 < \pi \\ - \pi & \le r_1 < \pi \end{aligned} \]and we use \(r_0, r_1\) to denote the rotational angles of the first and second joints respectively.
Important
Similar to
sbp_env.collisionChecker.ImgCollisionChecker, all white pixels will be within \(q \in C_\text{free}\) and vice versa. The body points obtained by the forward kinematic on \(r_0, r_1\) would be used to check collision in \(\mathcal{W}\) to ensure the entire body is in free space.- class sbp_env.engine.RobotArmEngine(args, image)[source]
Bases:
Engine- Parameters
args (PlanningOptions) –
image (str) –
- class sbp_env.collisionChecker.RobotArm4dCollisionChecker(img, map_mat=None, stick_robot_length_config=None)[source]
Bases:
CollisionChecker4D robot arm simulator engine.py that operates in the Image Space
- Parameters
img (
str) – a file-like object (e.g. a filename) for the image as the environment that the planning operatesmap_mat (
Optional[ndarray], optional) – an image that, if given, will ignore the img argument and uses map_mat directly as the mapDefault:Nonestick_robot_length_config (
Optional[Sequence[float]], optional) – a list of numbers that represents the length of the stick robotic armDefault:Nonestats – the Stats object to keep track of stats
- static _get_line(start, end)[source]
Bresenham’s Line Algorithm Produces a list of tuples from start and end
- Parameters
start – the start configuration
end – the end configuration
>>> points1 = get_line((0, 0), (3, 4)) >>> points2 = get_line((3, 4), (0, 0)) >>> assert(set(points1) == set(points2)) >>> print points1 [(0, 0), (1, 1), (1, 2), (2, 3), (3, 4)] >>> print points2 [(3, 4), (2, 3), (1, 2), (1, 1), (0, 0)] http://www.roguebasin.com/index.php?title=Bresenham%27s_Line_Algorithm
- _interpolate_configs(c1, c2)[source]
Given two configs (x, y, r1, r2), return interpolate in-between
- Parameters
c1 – the first configuration
c2 – the second configuration
- _pt_feasible(p)[source]
check if point is white (which means free space) in 2d
- Parameters
p – the configuration to check
- static create_ranges(start, stop, N, endpoint=True)[source]
Create a batch of linspace.
- Parameters
start (
ndarray) – an array of starting valuesstop (
ndarray) – an array of stopping valuesN (
int) – the size of linspaceendpoint (
bool, optional) – whether to include end point or notDefault:True- feasible(p, save_stats=True)[source]
Check if the configuration is in free-space, i.e., \(q \in C_\text{free}\)
- Parameters
p – configuration to check
- static get_pt_from_angle_and_length(pt1, angle, line_length)[source]
Obtain point 2 based of the given settings
- Parameters
pt1 – coordinate of pt1
angle – the current angle
line_length – the length of the arm
- visible(pos1, pos2)[source]
Check if the straight line connection between pos1 and pos2 is in \(C_\text{free}\). Internally it might calls
feasible().- Parameters
pos1 – the starting configuration of the line
pos2 – the target configuration of th eline
\(n\)-D Manipulator
This simulator internally depends on klampt package to check for collision in the the 3D space.
python main.py rrt klampt_data/tx90blocks.xml --engine klampt
In contrast to the former, this simulator not only check for point mass collisions, but performs forward kinematic with full body collision on the given joints configuration to check validity in world-sapce \(\mathcal{W}\subseteq \mathbb{R}^3\) and \(C \subseteq \mathbb{R}^d\). The full configuration space \(C\) is given by
\[q \equiv [r_0, \ldots, r_{d-1}] \in C \subseteq \mathbb{R}^d \]where
\[\begin{aligned} - \pi & \le r_i < \pi \quad \forall i \in \{0, \ldots, d-1\} \end{aligned} \]and we use \(r_0, r_1\) to denote the rotational angles of the first and second joints respectively.
Important
This simulator is based on the upstream klampt and the upstream repository might update its api without notice. The current implementation is based on Klampt==0.8.7
- class sbp_env.engine.KlamptEngine(args, xml_file)[source]
Bases:
Engine- Parameters
args (PlanningOptions) –
xml_file (str) –
- class sbp_env.collisionChecker.KlamptCollisionChecker(xml)[source]
Bases:
CollisionCheckerA wrapper around Klampt’s 3D simulator
- Parameters
xml (
str) – the xml filename for Klampt to read the world settingsstats – the Stats object to keep track of stats
- feasible(p, save_stats=True)[source]
Check if the configuration is in free-space, i.e., \(q \in C_\text{free}\)
- Parameters
p – configuration to check
- translate_from_klampt(p)[source]
Translate the given klampt’s configuration to our protocol
- Parameters
p – configuration to translate
- translate_to_klampt(p)[source]
Translate the given configuration to klampt’s configuration
- Parameters
p – configuration to translate
- visible(a, b)[source]
Check if the straight line connection between pos1 and pos2 is in \(C_\text{free}\). Internally it might calls
feasible().- Parameters
pos1 – the starting configuration of the line
pos2 – the target configuration of th eline